
作為中國南方最具規模的先進制造技術與高端裝備展覽會,2022年深圳國際工業制造技術及設備展覽會 ITES于8月15日舉辦,旨在為全球工業市場的技術進步、商貿合作與產業發展提供堅實力量。
在眾多品牌的展示下,機器人在線帶領大家直擊現場,詳細了解各家為我們帶來的多種產品!
法奧意威
法奧意威分別從工業場景運用案例和服務型場景運用案例上展示產品:
協作機器人焊接小車
法奧意威焊接小車被譽為“高效的行走焊接工”,焊接工藝包內的搖擺焊、斷焊、多層多道焊等多種工藝,可以滿足直線、圓形、外部軸聯動焊接、激光傳感器引導焊接等多種實際需求。相較傳統的工業機器人,可以快速使用。
艾灸機器人
艾灸機器人的雀啄灸、回旋灸、往復灸等多種技法,能根據不同體質實現差異化療效。在防燙傷方面,通過紅外測距,溫度傳感的雙重設置,保證安全。在艾灸煙灰回收方面,設置有集煙、集灰裝置,改善了以往艾灸過程中常見的煙塵吸入等問題。
精谷智能
機器人全自動三維光學掃描測量系統

精谷的高精度多軸機器人馬克斯曼Marksman,憑借±0.01mm重復定位精度高,集成布置費用低這兩大優勢并基于結構光原理的雙目視覺或者激光三角法的跟蹤掃描,在達到計量級測量精度的同時,能大幅提升物件復雜三維外形尺寸的測量品質和檢測效率。
精谷高精度機器人marksman

具有3-10kg全程負載能力。采用25位光電式雙編碼器和3組雙軸承系結構,有效抑制了運行中的抖動偏差,保障機器人的精度性和穩定性。整機重復定位精度最高可達 ±0.003mm水平。機器人可以根據需要配備視覺感知、力感知、自主避障、自主路徑規劃、自主能耗評估、AR交互、APP示教能力,更加安全且更加智能。采用模塊化的技術路徑,機器人維護保養簡便快捷。
因時機器人
微型伺服電缸

產品介紹:因時機器人的微型伺服電缸是一種小型一體化直線伺服系統,是機器人、醫療器械、工業設備等精密機電設備的核心運動部件。其內部集成了空心杯電機、精密行星減速器、傳感器、精密螺桿機構及閉環控制系統,具有體積小、精度高、負載大等技術特點,可以實現行程范圍內任意位置精確伺服控制。內置絕對位置傳感器,斷電后不會丟失位置信息,無需找零位。
優勢:驅控一體化設計、體積小、精度高、功率密度大、力控制(力控型號)。
仿人五指靈巧手

仿人五指靈巧手大小與人手相當,單手僅530g,6個自由度,12個運動關節,五指可靈活快速運動,結合力位混合控制算法,實現與人類的安全交互以及精準抓握!適用人形機器人、協作機器人、醫療機器人、特種機器人及假肢等。
壹悟科技
星羅自動化工廠解決方案成熟應用在工業場景與智能倉儲場景中柔性物流自動化解決方案中。

星羅自動化工廠解決方案具有高度靈活性和可配置性,通過可視化的流程編排引擎,可實現對各種工廠搬運流程的任務配置。
系統下游通過機器人調度系統RCS對接并調度多品牌、多接口、多導航方式的機器人和自動化設備,設備協同作業相互配合,大幅提升工廠作業效率和空間利用率,高效完成工廠自動化作業任務。
華成工控
推出了最新一代車床機械手控制系統產品QC-L3G
QC-L3G產品在硬件、軟件等方面均進行了結構的改進,配置了手控器、驅控一體機、伺服電機、編碼器線、動力線、制動電阻、掛鉤、蜂鳴器、開關電源、說明書等,具有集成度高、響應快速、安裝方便、抗干擾強、性價比高等特點。
QC-L3G還附帶有工藝邏輯與點位信息分離、單雙頭閥配置、車床一拖一、車床一拖二、改字工具、MODBUS通信等功能、組件。
知行機器人
知行自適應機器人手及基于“AI+3D視覺的智能抓取系統,廣泛應用于職業教育、工業制造、倉儲物流、生命科學、新零售、航空航天等領域。”
自主研發的機器手可進行精確位置和力控制,具有感知和反饋功能,解決機器人應用成本高、柔性差、操作復雜等問題。
迦智科技
輕量級智能無人叉車FOLA系列

BN2001D 托盤搬運式無人叉車,體積小,自重輕,最大額定載荷2000kg,叉齒舉升高度120mm,360度原地旋轉,適用于空間有限的車間、廠房作業需要,實現川字型托盤物料的自動化水平搬運。

DN1416 托盤堆高式無人叉車,額定載荷1400kg,舉升高度1600mm,滿載時運行速度可達1.35m/s,完成川字型托盤物料的自動堆高、裝卸、上下料;車身的多重安全防護機制,保障了人、車和貨物安全。
配天機器人
超高速桌面型機器人AIR12-940、AIR10-1210

兩款最新的超高速桌面型機器人AIR12-940、AIR10-1210,以其優越的性能和精巧的設計成為了此次展會最大的亮點。同時配天機器人也帶來了眾多應用方向的技術方案,其中包括多機聯動汽車尾氣管焊接、多層多道焊接+激光跟蹤、機器人飛拍展示;自動驗布機現場缺陷檢測、LED分光機快速定位、高跟隨性貼標機、移動展示臺及伺服系統全系列方案展示。
ATI工業自動化
ATI展示了ATI全自動工作站、力控裝配工作站、打磨拋光工作站、TM打磨工作站。

ATI全自動工作站使用 KUKA KR60 機器人搭載ATI的機器人工具快換裝置實現不同的末端材料去除工具切換,對水表金屬外殼進行去毛刺應用。
UR 機器人材料去除工作站采用AOV-10軸向浮動偏心振動砂光機搭載UR的協作機器人,對木質吉外殼進行打磨拋光,AOV-10本身具有易用性和多功能性,它可以提供比較大的浮動范圍,也可以對其進行調整以適應不同的工件表面需求,幫助企業解決生產需求。


DENSO力控裝配工作站使用電裝 VS060 系列機器人并在法蘭前端配合使用 ATI 力控傳感器進行芯片安裝功能演示。
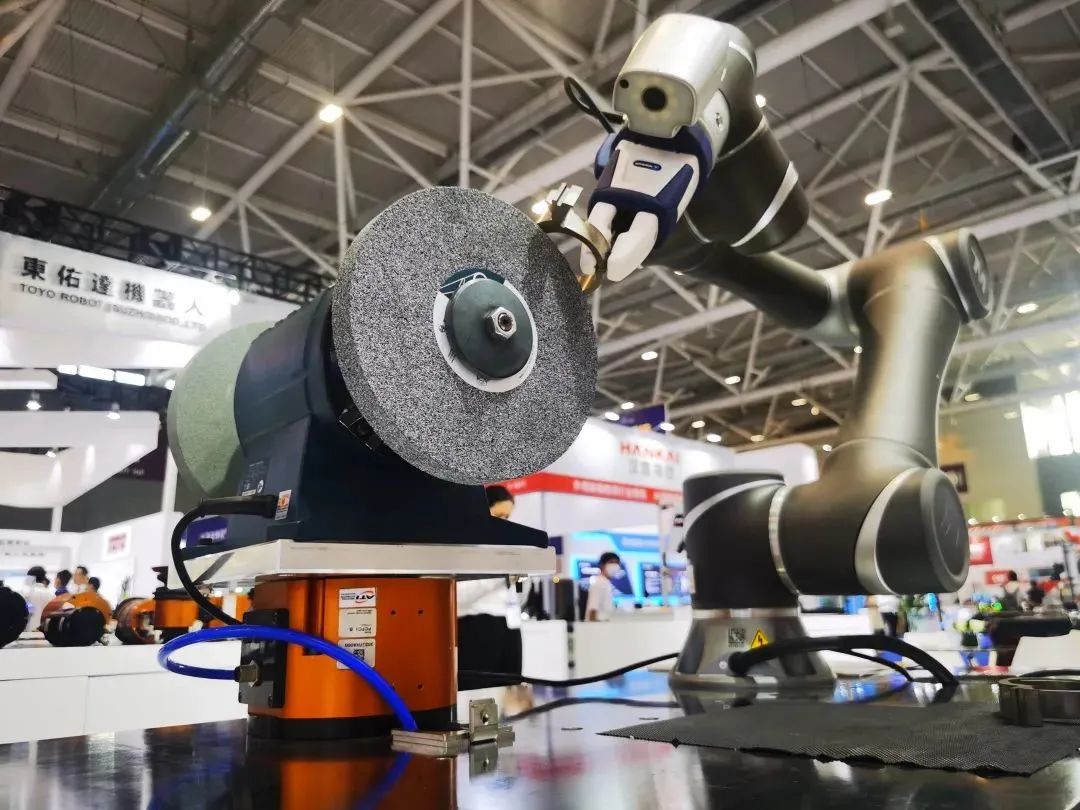
TM打磨工作站軸向浮動力控裝置搭載TM的協作機器人,PCFC是一個多用途的浮動裝置,本次演示效果為PCFC和砂輪機的組合,為的是給砂輪機提供浮動,通過機器人抓取工件的形式實現自動柔性打磨的過程。
艾利特
力控打磨
功能說明:
工站主要由艾利特EC66協作機器人結合凝智的力控工藝包,使用了Onrobot打磨工具。整個應用的核心是艾利特機器人的穩定軌跡和凝智的力控工藝包。
動作說明:
1、通過示教的打磨軌跡,引導機器人完成工件打磨工作;
2、在整個軌跡過程中,凝智的力控系統通過傳感器和機器人位置反饋,不斷給艾利特機器人發送實時位置信息,來保持在整個軌跡中工具能以一個恒定的力量施加給打磨物體。
大扭矩擰緊
功能說明:
艾利特EC612協作機器人搭載Desoutter擰緊系統,完成發動機的擰緊過程。該工站模擬展示發動機、變速箱等較大扭矩擰緊工藝,基于艾利特協作機器人的快速布局和安全特性進行的產線自動化升級,可以實現柔性且低成本的自動化方案。
動作說明:
1. EC612移動到擰緊螺釘點位;
2. 擰緊槍動作,擰緊螺釘;
3. 擰緊槍反轉,松開螺釘(為循環演示操作);
4. 重復以上動作。
